近日,前沿交叉研究院二宫正士教授课题组在国际期刊Sensors和Agronomy先后在线发表了题为“Automatic Branch–Leaf Segmentation and Leaf Phenotypic Parameter Estimation of Pear Trees Based on Three-Dimensional Point Clouds”和题为“Real-Time Localization and Colorful Three-Dimensional Mapping of Orchards Based on Multi-Sensor Fusion Using Extended Kalman Filter”的研究论文。
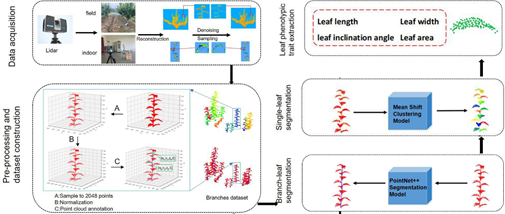
第一项研究提出了一种枝叶点云自动分割及叶片表型精准提取的技术方案。该技术借助PointNet++模型及点云形态拟合算法,实现了对叶倾角、叶长、叶宽和叶面积进行自动测量。利用该方法,估算出的梨叶片倾斜度、长度、宽度和面积与人工测量值具有较高的相关性, 决定系数分别为0.94(均方根误差4.44°)、0.94(均方根误差0.43 cm)、0.91(均方根误差0.39 cm)和0.93(均方根误差5.21 cm2)。该研究对监测梨树生长、模拟树冠光合作用、优化果园管理具有重要意义。
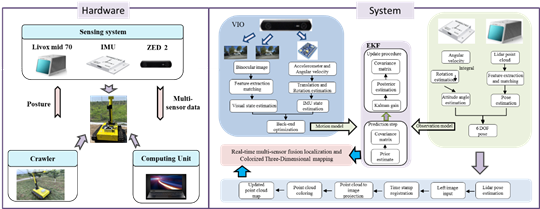
第二项研究提出了一种融合多传感器数据的方法,以实现果园机器人的实时定位和彩色激光雷达点云制图。该方法首先利用扩展卡尔曼滤波,可以对激光点云、视觉图像和惯性数据进行数据同化,再通过改进Loam_Livox算法将图像中的颜色投影到LiDAR点云上。结果显示,其在不同运动轨迹(平均RMSE: 0.3436)和不同场景(平均RMSE: 0.1230)下具有较高的定位精度,能够清晰高效地构建三维彩色测绘,对一帧LiDAR点云的定位和测绘时间仅为75.01 ms。该研究在果园的农用车辆自主导航方面具有巨大的潜力。
该论文的通讯作者单位为南京农业大学和东京大学,硕士生李海涛、张毅博分别为两篇论文的第一作者,二宫正士教授和穆悦讲师为通讯作者。南京农业大学张绍铃教授、陶书田教授、殷豪副教授和张保华副教授、齐开杰高级实验师,东京大学郭威副教授参与了研究。该研究得到了国家自然科学基金(32001980)、江苏省农业科技自主创新资金(CX(21)3016)、园艺学院交叉学科项目(YYJC202201)、作物遗传与种质创新国家重点实验室、江苏省现代作物生产协同创新中心和南京农业大学梨工程技术研究中心的资助。
论文链接:https://www.mdpi.com/1424-8220/23/9/4572
https://www.mdpi.com/2073-4395/13/8/2158